
SIMATIC S7-200 EM253 寻参
S7-200运动控制模块EM253寻找参考点的问题时,常常发现客户很容易混淆一些名词和概念,进而给大家的功能实现带来困扰。比如说:“RP”、“RPS”、“参考点”、“参考点寻找过程”、“RP偏移量”、“ZP”、“零脉冲”等名词。这些词看上去很相似,但有时它表示的含义是有差别的。
今天我们就聊聊这些名词的含义和区别,并用几个例子介绍一下运动控制中寻找参考点的过程。
一.名词概念解释
RPS——参考点信号,是从外接开关传感器(接近开关或者行程开关)传过来的信号。
RP(Reference point )——参考点,用于定义绝对位置坐标。这个参考点是通过RPS确定的,本身并没有实质性的硬件设备。
RP偏移量(RP_OFFSET)——是指从RP到零点的距离。
ZP——零脉冲信号,是电机编码器每转一圈所产生的信号。
有时,大家会把ZP和RP搞混。大家在某些情况下能看到“零点”这个词,我们会误认为“零点”就是ZP。“零点”顾名思义,就是绝对位置为0的点,当RP的绝对坐标为0(即RP_OFFSET=0)时,RP与零点是同一个点;当RP的绝对坐标不为0时,他们就是两个不同的点,参考点不一定坐标为0。而ZP是由编码器产生的一个信号,显然和“零点”是稍有差异的。
二.寻参步骤和过程
设置EM253寻找参考点功能是利用运动控制向导来实现的。基本分为两步:
第一步:设置参考点寻找速度(快速寻找速度和慢速寻找速度),初始寻找方向和最终接近参考点方向。
(注:在高级参考点选项中可以设置RP偏移量)
第二步:组态寻找参考点的顺序。也就是手册中提到寻参模式。
下面利用两个示例,帮助我们深入学习和理解以上的这些名词概念。同时,大家也可以利用《S7-200系统手册》第九章中RP寻参模式的示意图进一步了解相关知识。
示例1:
向导中设置初始寻找方向为正向,最终接近方向为正向。选择模式1。如果起点在如图(1)位置,执行POS_RSEEK指令后,首先按照高速正向寻找,当检测到RPS信号上升沿后,由高速降低到低速继续寻参,当RPS信号失效即检测到RPS下降沿时,则以当前点作为参考点,即终点。
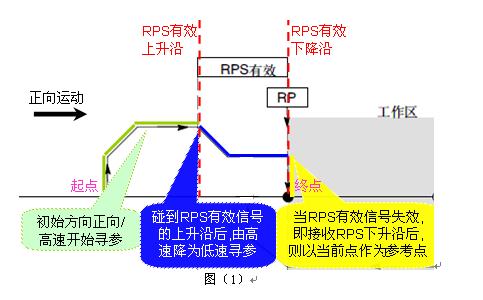
如果向导中高级RP选项设置RP_OFFSET=0,当找到参考点后,则当前位置即为零点。如果RP_OFFSET非零,例如RP_OFFSET=150,则当找到参考点后,当前位置即为150。
这里抛砖引玉,按照以上的思路,大家可以进而学习了解RP寻找模式1和模式2的其他运动轨迹。
在以上的示例中,我们谈到了模式1和模式2。这两种模式中是没有“ZP”零脉冲的概念。那么什么时候需要考虑“ZP”零脉冲呢?为什么要在寻参模式中使用ZP信号作为最终定位的依据呢?
接下来我们介绍一点背景知识:
一些数控机床会采用带增量型编码器的伺服电机。编码器采用光电原理将角位置进行编码,在编码器输出的位置编码信息中,会有一个零脉冲信号,编码器每转产生一个零脉冲。当伺服电机安装到机床床身时,伺服电机的位置确定,编码器零脉冲的角位置也就确定了。由于编码器每转产生一个零脉冲,在坐标轴的整个行程内有很多零脉冲,这些零脉冲之间的距离是相等的,而且每个零脉冲在机床坐标系统的位置是绝对确定的。为了确定坐标轴的原点,可以利用某一个零脉冲的位置作为基准,这个基准就是坐标轴的参考点。
结合示例1,我们已经知道真正能够确定寻参后电机在轨道上位置的是RPS的右侧边沿,然而RPS是外部接入的开关信号,难免会出现偏移。这将使得寻参后的RP发生偏移。这样就不能保证每次寻参后电机都能停在轨道的相同位置。然而根据ZP的定义可以想见:电机及其随动设备一旦安装完毕,ZP信号在运行轨道上的位置也随之固定。如果采用穿过RPS后的ZP数来定位,即使RPS信号的下降沿有一点点偏移,最终的RP都将定位在确定的位置。所以说,综合使用RPS信号和ZP信号作为最终定位的依据,会使得RP(参考点)的定位更加精确。
基于以上的应用需求,位控向导为我们提供了模式3和模式4。
如果选择模式3定位RP,则在RPS输入变为无效后接收到指定ZP个脉冲后确定RP,所以参考点RP位于RPS输入的有效区外。如果选择模式4定位RP,则在RPS输入变为有效后接收到指定ZP个脉冲后确定RP,所以参考点RP通常位于RPS输入的有效区内。接下来我们仍然使用一个例子,更好的理解一下应用ZP脉冲数精准定位的功能。
示例2:
向导中设置初始寻找方向为正向,最终接近方向为正向。选择模式3。如果起点在如图(2)位置,执行POS_RSEEK指令后,首先按照高速正向寻找,当检测到RPS信号上升沿后,由高速降低到低速继续寻参,当RPS信号失效即检测到RPS下降沿后继续低速寻找参考点,直到接收到指定的ZP脉冲数,则以当前点作为参考点,即终点。
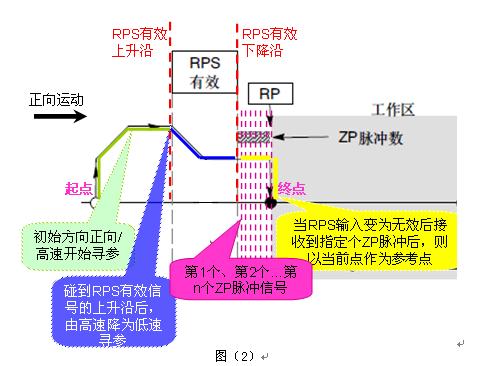
如果向导中高级RP选项设置RP_OFFSET=0,当找到参考点后,则当前位置即为零点。如果RP_OFFSET非零,例如RP_OFFSET=150,则当找到参考点后,当前位置即为150。
按照以上的思路,大家可以进而学习了解RP寻找模式3和4的其他运动轨迹。
在实际的应用中,为了确定参考点的位置,通常在数控机床的坐标轴上配置一个参考点行程开关。数控机床在开机后,首先要寻找参考点行程开关,在找到参考点行程开关之后,在寻找与参考点行程开关距离最近的一个零脉冲作为该坐标的参考点,根据参考点就可以确定机床的原点了。
读到这里,相信您对EM253定位功能又有了一些新的认识吧。我们这里仅仅抛砖引玉,希望对您的学习和使用能有一点点的帮助。
- 上一篇:300模拟量模块的诊断功能 2014/4/19
- 下一篇:剑桥自动携合作伙伴结合解决方案闪亮于工博会 2014/4/19
